Lab 7#
This lab is devoted to metrology, by detecting features on the image L.png.
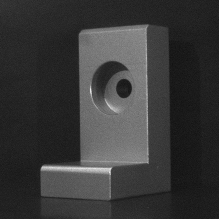{kind=link}
Recall what the following detectors can do: Canny, Harris, Hough, Moravec, Prewitt, Roberts, Sobel.
Sobel and Canny detectors#
Display the image gradients with the Sobel detector (
skimage.filters.sobel).Apply a threshold on the obtained image to perform an edge detection. What is the influence of the threshold on the result?
Find the optimal threshold, i.e. the one which gives most of the edges of the object while keeping precise locations of the edges.
What is the relationship between Sobel and Canny detectors?
Display the edges detected by Canny detector (
skimage.feature.canny).Discuss the influence of the main parameters of the method, namely the size of the Gaussian filter and the two thresholds.
It is sometimes interesting to compare the studied methods in terms of computation time. The computation time can be obtained by calculating the difference between the time \(t_2\) measured after executing the method and the time \(t_1\) measured before its execution. For that, you can use the function
time.timewhich gives the number of seconds elapsed since January 1, 1970. What is the fastest method?
Harris detector#
Apply the Harris detector (with
skimage.feature.corner_harrisandskimage.feature.corner_peaks).Criticize the result: have all the corners been detected? Are there any false alarms (i.e. detections that do not correspond to corners)? How to explain these errors?
Hough transform#
The Hough transform does not apply directly to the original image: what image should you use?
Represent the Hough transform of the image with
skimage.transform.hough_line.The function
skimage.transform.hough_line_peaksextracts the parameters of the most important lines from the Hough transform. Use this function to display the six most important lines of the image.